1ΓΔ“ΐ―‘
“Τœύ»Ϊ«≈‘Ύ¥σΙΠ¬ ≥ΓΚœ”Π”ΟΒΡ±»ΫœΕύΘ§ «ΦΦ θ±»Ϋœ≥… λΒΡ“Μ÷÷ΩΣΙΊΆΊΤΥΓΘ“Τœύ»Ϊ«≈DC/DC±δΜΜΤς «Ζ«œΏ–‘ ±±δΒγ¬ΖΓΘ‘ΎΖ÷Έω ±Θ§”ΟΨ≠ΒδœΏ–‘Βγ¬Ζάμ¬έΚΆΩΊ÷Τάμ¬έΕ‘ΤδΫχ–––Γ–≈Κ≈Ϋ®ΡΘΘ§Ϋ®ΝΔΩΣΙΊΒΡΉ¥Χ§Ω’ΦδΤΫΨυΡΘ–ΆΘ§Ε‘Τδ≈δ÷ΟΝψΦΪΒψΘ§…ηΦΤΩΊ÷ΤΤςΓΘΕχ‘Ύ ΐΉ÷ΩΊ÷ΤάοΘ§Ήν÷Ί“ΣΒΡΨΆ «PIΒςΫΎΓΘ
PI≤Έ ΐΒΡ―Γ‘ώ «Κή”–Ϋ≤ΨΩΒΡΓΘ“Τœύ»Ϊ«≈Ω’‘ΊΒΡ ±Κρ «“ΜΗω«ΖΉηΡαΕΰΫΉœΒΆ≥Θ§¥χ‘Ί ±Θ§œΒΆ≥ΒΡΝψΦΪΒψ”÷ΜαΖΔ…ζ±δΜ·ΓΘΥυ“‘Θ§PIΒΡ―Γ‘ώ“Σ ΙœΒΆ≥‘Ύ’ϊΗωΗΚ‘ΊΖΕΈßΡΎ±Θ≥÷ΝΦΚΟΒΡΕ·Ψ≤Χ§ΧΊ–‘ΓΘPI≤Έ ΐΒΡΦΤΥψ“≤”–Ρ―Ε»ΓΘ”ΟΒΞΜΖΩΊ÷ΤΫχ––ΒςΫΎΘ§Ω… ΙΩΊ÷ΤΤςΒΡ…ηΦΤΦρΜ·Θ§ΒΪ «’β÷÷ΖΫΖ®÷Μ”–Β±ΗΚ‘Ί»≈Ε·ΒΡ”Αœλ‘Ύ δ≥ωΕΥ±μœ÷÷°ΚσΘ§ΩΊ÷ΤΤς≤≈”–Ζ¥”ΠΘ§ΩΊ÷ΤΥΌΕ»≤ΜΩλΓΘ“ρ¥ΥΘ§≤…”ΟΒγ―ΙΒγΝςΥΪ±’ΜΖΩΊ÷ΤΘ§Β±»ΜΘ§ΩΊ÷ΤΤς±»ΒΞΜΖΩΊ÷Τ ±ΗϋΡ―…ηΦΤΓΘ
”ΟMATLAB÷–ΒΡSISOTOOLΡΘΩιΘ§‘Ύ±’ΜΖΩΊ÷ΤœΒΆ≥ΒΡ…ηΦΤΙΐ≥Χ÷–Ϋχ–––Θ’ΐΘ§Φθ…ΌΝΥ…ηΦΤΒΡΗ¥‘”–‘ΚΆ÷ΊΗ¥–‘Θ§”––ßΒΊΧαΗΏΝΥ–Θ’ΐœΒΆ≥ΒΡΩΊ÷ΤΨΪΕ»Θ§ΗχΩΊ÷ΤœΒΆ≥ΒΡ…ηΦΤ¥χά¥ΗϋΗΏΒΡ–ß¬ ΚΆΗϋΚΟΒΡ÷ ΝΩΘ§ΦρΜ·ΝΥ…ηΦΤΒγ―ΙΒγΝςΥΪ±’ΜΖΩΊ÷ΤΙΐ≥Χ÷–¥σΝΩΒΡΦΤΥψΘ§Ήν÷’ΒΟΒΫΈ»Ε®ΒΡΡΘ–ΆΚΆΚΟΒΡΕ·Χ§ΧΊ–‘ΓΘ
2ΓΔ“Τœύ»Ϊ«≈ΒΡΡΘ–Ά
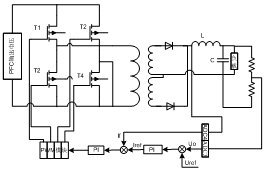
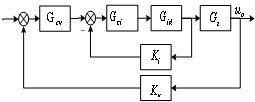
“Τœύ»Ϊ«≈ZVS±δΜΜΤςΚΆΤ’Ά®ΒΡBUCK±δΜΜΤς”–“ΜΕ®ΒΡœύΥΤ–‘Θ§”…”Ύ“Τœύ»Ϊ«≈”–¬©Η–Θ§Υυ“‘”÷”–Ή≈œ‘÷χΒΡ≤ΜΆ§ΓΘ’ΦΩ’±» Ε‘ΒγΗ–ΒγΝς
Ε‘ΒγΗ–ΒγΝς ΒΡ¥ΪΒίΚ· ΐ[1] «
ΒΡ¥ΪΒίΚ· ΐ[1] «
 Θ®1Θ©
Θ®1Θ©
Τδ÷–Rd=4n2LlkfsΓΘ
Ψ≠ΙΐΦΤΥψΘ§―Γ»ΓUin=400VΘ§U0=48VΘ§ΩΣΙΊ¬ ΤΒfs=100kHzΘ§ δ≥ωΙΠ¬ P=400WΘ§RL=5.76ΠΗΓΘΗυΨίΦΤΥψΒΟΘ§n=5Θ§Lf=150uhΘ§Cf=330uhΘ§ Llk=80ufΓΘ
3ΓΔ”ΟSISOΕ‘“Τœύ»Ϊ«≈ΩΊ÷ΤΤςΫχ––PI≤Έ ΐ≈δ÷Ο
Ε‘“ΜΑψΒΡΩΊ÷ΤœΒΆ≥ά¥Ϋ≤Θ§ΩΊ÷ΤœΒΆ≥Ε‘ΩΣΜΖΤΒ¬ ΧΊ–‘ΒΡ“Σ«σ»γœ¬ΘΚ
(1)ΈΣΝΥΜώΒΟΫœΚΟΒΡœΒΆ≥Έ»Ε®–‘Θ§ΩΣΜΖœΒΆ≥÷–ΤΒΕΈ”Π”–ΉψΙΜΒΡΤΒ¥χΩμΕ»Θ§“‘-20dB/decΒΡ–±¬ ¥©‘Ϋ0Ζ÷±¥œΏΘΜ
(2)ΈΣΝΥΜώΒΟΫœΚΟΒΡΕ·Χ§ΧΊ–‘Θ§ΫΊ÷ΙΤΒ¬  ”ΠΫœΗΏΘΜ
”ΠΫœΗΏΘΜ
(3)”ΠΗΟΝτ”–ΉψΙΜΒΡœύΈΜ‘ΘΝΩ Θ§ΙΛ≥ΧΝλ”ρΤ’±ι»œΈΣ=45Γψ±μ ΨœΒΆ≥ΨΏ”–ΉψΙΜΒΡœύΈΜ‘ΘΕ»Θ§œύΈΜ‘ΘΕ»‘Ϋ¥σΘ§Ε‘”ΠœΒΆ≥ΒΡ≥§ΒςΝΩΨΆΜα‘Ϋ–ΓΘΜ
Θ§ΙΛ≥ΧΝλ”ρΤ’±ι»œΈΣ=45Γψ±μ ΨœΒΆ≥ΨΏ”–ΉψΙΜΒΡœύΈΜ‘ΘΕ»Θ§œύΈΜ‘ΘΕ»‘Ϋ¥σΘ§Ε‘”ΠœΒΆ≥ΒΡ≥§ΒςΝΩΨΆΜα‘Ϋ–ΓΘΜ
(4)ΈΣΝΥΧαΗΏœΒΆ≥ΒΡΈ»Ε®ΧΊ–‘Θ§ΒΆΤΒΕΈ”ΠΗΟ”–ΗΏΒΡ‘ω“φΘΜ
(5)ΈΣΝΥΧαΗΏœΒΆ≥ΒΡΩΙΗΏΤΒΗ…»≈ΡήΝΠΘ§ΗΏΤΒΕΈ”ΠΗΟ”–ΩλΒΡΥΞΦθΓΘ
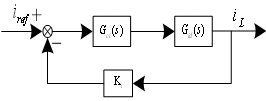
±ΨΈΡ≤…”Ο»Ϊ ΐΉ÷ΩΊ÷ΤΜΖ¬Ζ…ηΦΤΖΫΖ®Θ§‘ΎΝ§–χ”ρ÷–Θ§Ά®ΙΐSISOTOOLά¥≈δ÷ΟPIΩΊ÷ΤΤςΘ§άκ…ΔΜ·Κσ‘Ό”…DSPΩΊ÷ΤΘ§“Τœύ»Ϊ«≈œΒΆ≥ΩρΆΦ»γΆΦ1Υυ ΨΓΘ
ΆΦ1 “Τœύ»Ϊ«≈ΒΡΩΊ÷ΤΩρΆΦ
SISOTOOL «MATLAB÷–ΒΡ“ΜΗωΆΦ–Έ”ΟΜßΫγΟφΘ§Ά®Ιΐάϊ”ΟΗυΙλΦΘΆΦΜρ≤°Β¬ΆΦά¥Βς’ϊΒΞ δ»κΒΞ δ≥ωΖ¥άΓΩΊ÷ΤœΒΆ≥Θ§Ϋχ––ΩΊ÷ΤΤςΒΡ…ηΦΤΓΘΥϋ≤Μ–η“Σ“‘ΟϋΝν––ΒΡΖΫ Ϋ δ»κ¥σΝΩΒΡ÷ΗΝνΘ§÷Μ–ηΒΦ»κΗςΜΖΫΎΒΡΡΘ–ΆΘ§”Ο σ±ξΩ…“‘÷±Ϋ”Ε‘ΤΝΡΜ…œΒΡΕ‘œσΫχ––≤ΌΉςΓΘ’β―υΘ§”κSISOTOOLΝ§Ϋ”ΒΡΩ… ”Ζ÷ΈωΙΛΨΏLTIviewer¬μ…œœ‘ Ψ≥ω…ηΦΤΫαΙϊΘ§”ΟΜßΩ…ΫαΚœ±’ΜΖœλ”Πά¥Βς’ϊ‘ω“φΚΆΝψΦΪΒψΘ§¥”Εχ…ηΦΤ≥ω¬ζ“βΒΡΩΊ÷ΤΤςΓΘ±ΨΈΡ÷ς“ΣΆ®ΙΐΤΒ”ρΒςΫΎΒΡΖΫΖ®Θ§ά¥ΒΟΒΫΚœάμΒΡ≤Ι≥ΞΩΊ÷ΤΤςΓΘ
3.1 ΒγΝςΜΖΒΡ…ηΦΤ
“‘ δ≥ω¬Υ≤®ΒγΗ–ΒγΝςΉςΈΣΒγΝςΖ¥άΓΘ§ΒγΝςΜΖΙΠ¬ ΦΕΒΡ¥ΪΒίΚ· ΐΦΤΥψΚσΈΣ

ΫΪ δ≥ω¬Υ≤®ΒγΗ–ΒΡΒγΝςΉςΈΣΩΊ÷ΤœΒΆ≥ΡΎΜΖΘ§≤ΜΫωΩ…“‘¥σ¥σΧαΗΏΩΊ÷ΤœΒΆ≥ΒΡΈ»Ε®–‘Θ§ΗΡ…ΤœΒΆ≥ΒΡΕ·Χ§ΧΊ–‘ΚΆΈ»Χ§ΧΊ–‘Θ§Εχ«“ΜΙΩ…“‘ΧαΙ©ΩλΥΌΒΡΙΐΝς±ΘΜΛΓΘ¥χΒγΗ–ΒγΝςΡΎΜΖΒΡΩΊ÷ΤœΒΆ≥ΩρΆΦ»γΆΦ2Υυ ΨΓΘ
ΆΦ2 ΒγΝςΩΊ÷ΤΜΖ
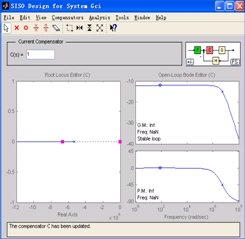
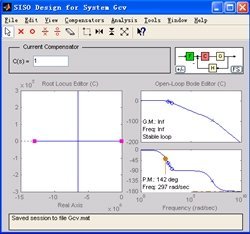
Θ®1Θ©»ΓKi=0.1Θ§‘ΎΟϋΝν–– δ»κΒγΝςΜΖΙΠ¬ ΦΕΒΡΩΣΜΖ¥ΪΒίΚ· ΐΘ§num=[0.066Θ§34.722]ΘΜden=[0.0000000495Θ§0.2679Θ§139.89]ΘΜG=tf(numΘ§den)ΘΜsisotool
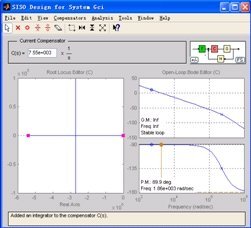
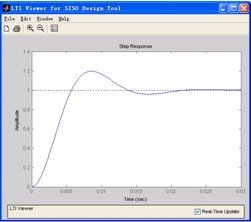
Θ®2Θ©ΒΦ»κœΒΆ≥ΗςΗωΜΖΫΎΒΡΡΘ–ΆΓΘΒψΜςΓΑFileΓ±≤ΥΒΞœ¬ΒΡΓΑimport..Γ±ΒΦ»κΕ‘œσΡΘ–ΆGΘ§≥ωœ÷»γΆΦ3Θ®aΘ©Υυ ΨΫγΟφΓΘΩ…“‘¥ρΩΣAnalysisάοΟφΒΡResponse to
(a)
Θ®bΘ©
ΆΦ 3
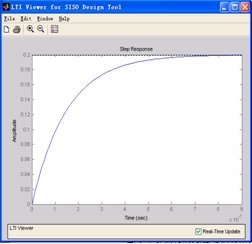
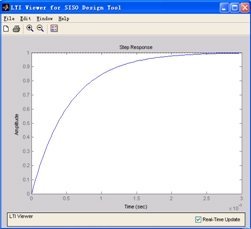
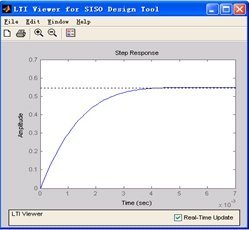
Step CommandΒΎ“Μ≤ΫΘ§Ιέ≤λΩΣΜΖœΒΆ≥ΒΡΫΉ‘Ψœλ”ΠΘ§»γΆΦ3Θ®bΘ©Υυ ΨΓΘ
Ιέ≤λΥϋΒΡΖυΤΒΧΊ–‘Θ§ΒΆΤΒ‘ω“φΧΪΒΆΓΘ”…ΤδΫΉ‘Ψœλ”ΠΩ…÷ΣΘ§œΒΆ≥”–Ψ≤≤νΘ§–η“Σ‘ω¥σΤδ±»άΐœΒ ΐΓΘΩ…”Ο σ±ξΆœΉΓ”“±ΏΖυΤΒΧΊ–‘÷–ΒΡΆΦ–ΈΘ§ ΙΤδ‘ω“φ¥σ”Ύ“ΜΕ® ΐ÷ΒΘ§ ΙΫΉ‘Ψœλ”ΠΈόΨ≤≤νΓΘ»ΜΚσΘ§‘ΌΦ”»κΜΐΖ÷ΜΖΫΎ“≤Ω…œύ”ΠΧαΗΏΤδΒΆΤΒ≤ΩΖ÷ΒΡ‘ω“φΓΘ»γΆΦ4Υυ ΨΓΘ
(a)
(b)
ΆΦ4
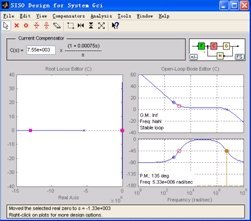
ΈΣΝΥ ΙœΒΆ≥ΨΏ”–ΗϋΩλΒΡΕ·Χ§œλ”ΠΘ§‘Ύ±Θ÷ΛœΒΆ≥Έ»Ε®ΒΡ«ΑΧαœ¬Θ§ΒγΝςΜΖΒΡΫΊ÷ΙΤΒ¬ ≤ΜΫω“Σ¥σ”ΎΒγ―ΙΜΖΒΡΫΊ÷ΙΤΒ¬ Θ§Εχ«“”ΠΗΟ‘Ϋ¥σ‘ΫΚΟΘ§“ρΈΣΗΟΒγΝς±Ί–κ”–ΉψΙΜΒΡ¥χΩμ ΙΒγΝςΗζΉΌΒγΝςΗχΕ®ΓΘ“ΜΑψ»ΓΒγΝςΜΖΒΡΫΊ÷ΙΤΒ¬ ΈΣΩΣΙΊΤΒ¬ ΒΡ1/5ΓΪ1/10ΓΘ
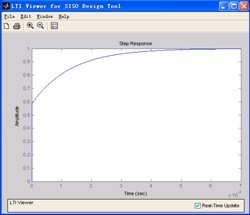
ΈΣΝΥ±Θ÷ΛΉψΙΜΒΡœύΈΜ‘ΘΕ»Θ§Εχ«“±Θ÷ΛΫœΗΏΒΡΫΊ÷ΙΤΒ¬ Θ§«““‘-20db¥©‘ΫΘ§ΩΦ¬«ΧμΦ”“ΜΗωΝψΒψΘ§‘ΌΫχ–– Β±ΒΡΒς’ϊΘ§Ω…ΒΟΆΦ5Υυ ΨΒΡΆΦ–ΈΓΘΒ±œύΈΜ‘ΘΕ»Κή¥σΘ§ΫΊ÷ΙΤΒ¬ ΚήΗΏ ±Θ§œΒΆ≥≥§ΒςΚή–ΓΜρΈό≥§ΒςΓΘΒΟΒΫΒγΝςΜΖΒΡPIΜΖΫΎΈΣ 
PIΜΖΫΎΒΡ≤Έ ΐ «Ki=7550Θ§Kp=5.67Θ§œύΫ«‘ΘΕ»ΈΣ135ΓψΘ§ΫΊ÷ΙΤΒ¬ ΈΣ5.33ΓΝ106rad/secΓΘ
(a)
(b)
ΆΦ5
3.2 Βγ―ΙΜΖΒΡ…ηΦΤ
Βγ―ΙΜΖΒΡ≤Ι≥ΞΆχ¬γ «Α―“―Ψ≠…ηΦΤΚΟΒΡΒγΝςΡΎΜΖΩ¥ΉωΒγ―ΙΒςΫΎœΒΆ≥÷–ΒΡ“ΜΗωΜΖΫΎά¥Ϋχ––ΓΘΨΆ «ΥΒΘ§…ηΦΤΒγ―Ι≤Ι≥ΞΜΖΫΎΒΡ ±Κρ±Ί–κœ»Α―ΒγΝςΜΖ±’ΚœΘ§ΩΊ÷ΤΕ‘œσ « δ≥ωΈσ≤νΒγ―ΙΩΊ÷Τ–≈Κ≈ΒΫ±δΜΜΤς δ≥ωΒγ―ΙΒΡ¥ΪΒίΚ· ΐΓΘΕ‘Βγ―ΙΜΖά¥ΥΒΘ§ΤδΙΠ¬ ΦΕΒΡ¥ΪΒίΚ· ΐΑϋΚ§ΒγΝςΜΖΚΆΗΚ‘ΊΓΘΤδœΒΆ≥ΩΊ÷ΤΩρΆΦ»γΆΦ6Υυ ΨΓΘ
ΆΦ6 Βγ―ΙΩΊ÷ΤΜΖ
(1) Ήœ»“ΣΒΟ≥ωΒγΝςΜΖΒΡ±’ΜΖ¥ΪΒίΚ· ΐ
‘Ύcommand window δ»κœ¬Ν–”οΨδΘΚ
num=[0.66,347.22]ΘΜ
den=[0.0000000495,0.2679,139.89]ΘΜ
num1=[5.67,7550]ΘΜ
den1=[1,0]ΘΜ
[num2,den2]=series(num,den,num1,den1)ΘΜ
num3=[0.1]ΘΜ
den3=[1]ΘΜ
[num4,den4]=feedback(num2,den2,num3,den3)ΘΜ
printsys(num4,den4)ΘΜ
(2)ΒγΝςΜΖΒΡΗΚ‘Ί «”… δ≥ωΒγ»ίΚΆΗΚ‘ΊΉι≥…ΒΡΆχ¬γΘ§ΚΆ…œ“ΜΗωΜΖΫΎ¥°ΝΣΓΘ

‘Ύcommand window δ»κœ¬Ν–”οΨδΘΚ
num5=[5.76];
den5=[0.0019008,1];
[num6,den6]=series(num5,den5,num4,den4)ΘΜ
(3)»ΓKv=1/48Θ§ δ»κ»γœ¬ΒΡ÷ΗΝνΘΚ
num7=[1];
den7=[48];
[num8,den8]=series(num6,den6,num7,den7);
G1=tf(num8,den8);
SisotoolΘΜ
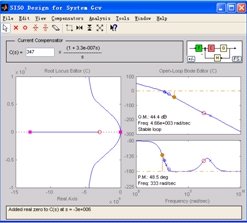
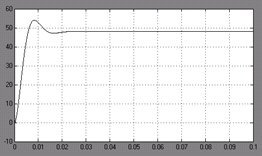
(4)Ά§άμΘ§ΒΦ»κΕ‘œσΡΘ–ΆΘ§ΟϋΟϊΈΣGcvΓΘΙέ≤λΩΣΜΖœΒΆ≥ΒΡΫΉ‘Ψœλ”ΠΘ§»γΆΦ7Θ®bΘ©Υυ ΨΓΘΩΣΜΖœΒΆ≥ΒΡΫΉ‘Ψœλ”Π”–Ψ≤≤νΘ§“ρ¥ΥΘ§”ΠΗΟ‘ω¥σΒΆΤΒ‘ω“φ ΙΤδΫΉ‘Ψœλ”Π¥οΒΫ1ΓΘœύ”ΠΒΡΦ”»κΜΐΖ÷ΜΖΫΎ“≤Ω…“‘ΧαΗΏΒΆΤΒ‘ω“φΓΘ
(a)
(b)
ΆΦ7
Ψ≠ΙΐΒςΫΎΚσΒγ―ΙΜΖΒΡPI≈δ÷ΟΈΣ

œύΫ«‘ΘΕ»ΈΣ48.5ΓψΘ§ΫΊ÷ΙΤΒ¬ ΈΣ333rad/secΓΘœΒΆ≥ΖυΤΒΧΊ–‘ΚΆΫΉ‘Ψœλ”Π»γΆΦ8Υυ ΨΓΘ
(a)
(b)
ΆΦ8
4ΓΔΖ¬’φΫαΙϊ
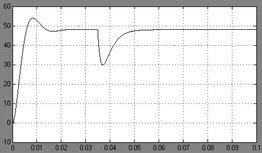
ΆΦ9 “Τœύ»Ϊ«≈ δ≥ωΒγ―Ι≤®–Έ
ΆΦ10 ”–ΗΚ‘Ί»≈Ε· ±ΒΡ≤®–Έ
ΆΦ9ΈΣ“Τœύ»Ϊ«≈‘Ύ’ΐ≥Θ«ιΩωœ¬ δ≥ωΒγ―ΙΒΡœλ”Π≤®–ΈΘ§Βγ―Ι‘ΎΚήΕΧΒΡ ±ΦδΡΎ¥οΒΫ48VΓΘΆΦ10ΈΣ”–ΗΚ‘Ί»≈Ε· ±ΒΡ≤®–ΈΘ§œΒΆ≥‘Ύ”ωΒΫ»≈Ε·ΚσΚήΩλΜ÷Η¥ΤΫΚβΘ§ δ≥ω»‘»ΜΈΣ48VΓΘ
5ΓΔΫα¬έ
≤…”ΟSISOTOOLΩ…“‘ΚήΩλΒΡ…ηΦΤ≥ωœΒΆ≥ΒΡΥΪΩΊ÷ΤΜΖΘ§Φ»Ρή±Θ÷ΛœΒΆ≥ΒΡΈ»Ε®–‘Θ§“≤Ρή±Θ÷ΛœΒΆ≥ΚΟΒΡΕ·Χ§–‘ΡήΘ§¥σ¥σΥθΕΧΝΥ…ηΦΤœΒΆ≥–η“ΣΒΡ ±ΦδΓΘ‘ΎΡΘ–ΆΗ¥‘”ΓΔΕΰΫΉ“‘…œΒΡ ΐΉ÷ΩΊ÷ΤΒΡΒγ‘¥œΒΆ≥÷–Θ§”ΟSISOTOOLΕ‘±’ΜΖΩΊ÷ΤœΒΆ≥Ϋχ–––Θ’ΐ,Φθ…ΌΝΥ…ηΦΤΒΡΗ¥‘”–‘,”––ßΒΊΧαΗΏΝΥ–Θ’ΐœΒΆ≥ΒΡΩΊ÷ΤΨΪΕ»,ΧαΗΏΝΥΩΊ÷ΤœΒΆ≥ΒΡ…ηΦΤΒΡ–ß¬ ΚΆ÷ ΝΩΓΘ

 -
-